トップページに戻る(マイコン徹底入門:STM32で始めるARM/Cortex-M3組み込み開発)
「マイコン徹底入門」とは? | 「マイコン徹底入門」を読む | ダウンロード | 掲示板 | 筆者の自己紹介
Previous: 9.1. マウス |
Up: 9.1. マウス |
Next: 9.1.2. マイコンとのピン接続 |
マウスのハードウェア部分の仕様は以下の通りです。
|
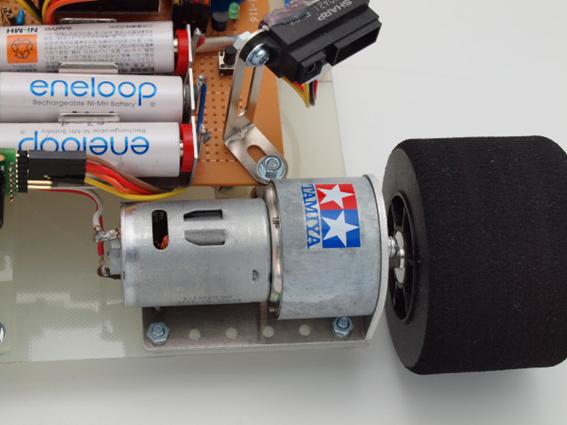
・電源は7.2Vの充電電池(単三×6)。ただし試作中は9VのACアダプタで電力を供給。 写真 9?2 エネループ(ニッケル水素電池)を6本直列にしている ***P2170585***
写真 9?3 5V用レギュレタは小型ものものを使用した ***P2170589***
・4輪。前輪2輪を左右別々に駆動。後輪2輪はフリー。 ・前輪2輪はギヤダウン式380クラスモータ(タミヤ製 ギヤードモータ380K75&64mmスポンジタイヤ)2組を使用。 写真 9?4 タミヤ製ギヤダウンユニットを使用 ***P2170570***
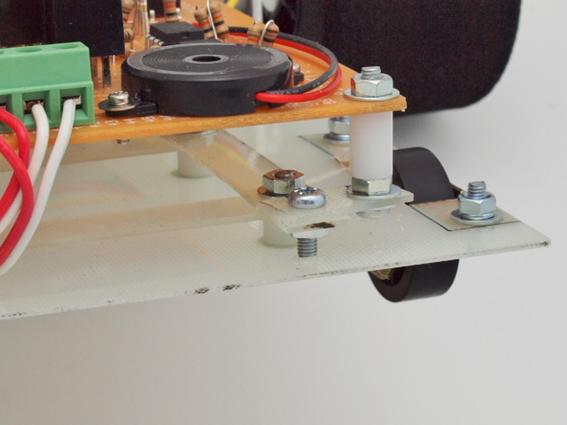
・シャーシは1mm厚FRP板を使用する。基板にたわみ負荷がかからないように、FRPでダブルデッキ型にして、その上に基板を載せる。 写真 9?5 シャーシは基板に負担を掛けないように三重構造とした ***P2170587***
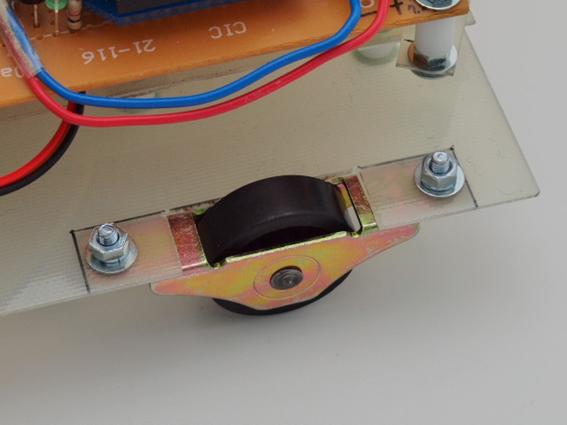
写真 9?6 後輪はホームセンターで買った引き戸用のコマ ***P2170580***
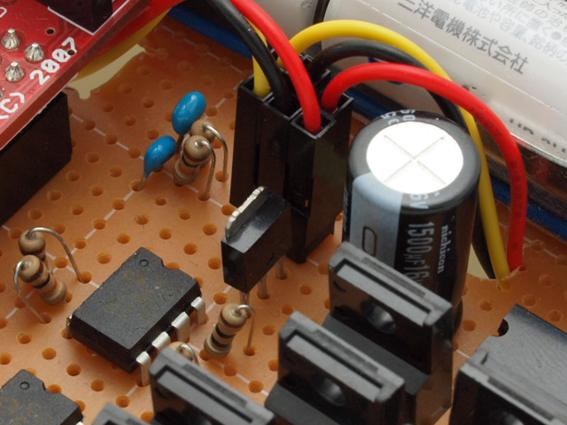
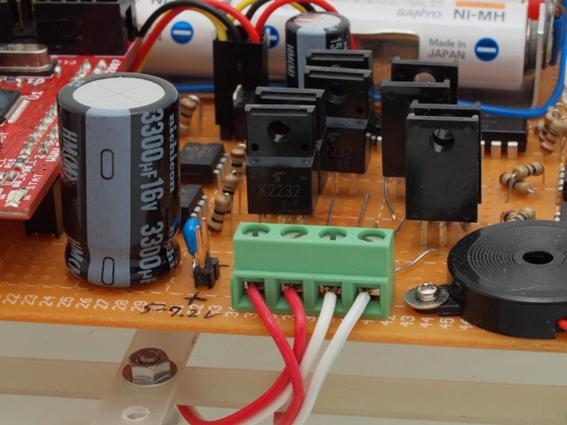
・前輪2輪を駆動するモータドライバはHブリッジ方式とする。ハイサイド2SJ334、ローサイド2SK2232を使用してヒートシンク無しで、連続10A程度の供給を可能にする。FETのドライブには、高周波数でのPWM駆動を可能にするためTC4428を使用。モータドライバはTIM3CH1-4とGPIOY_4-7を使用して駆動。 写真 9?7 Hブリッジを構成するFET ***P2170575***
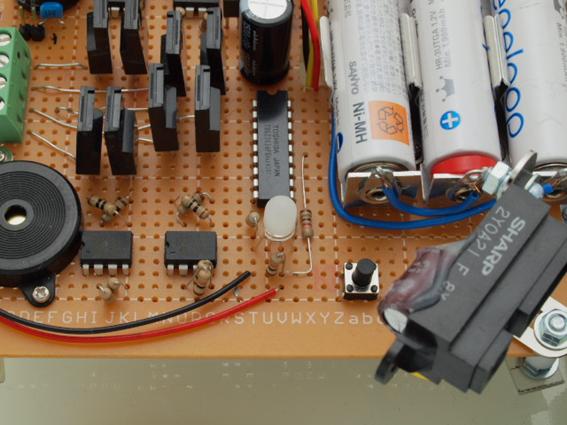
・離れたところからロボットの状態を確認できるようにするためにフルカラーLED(OSTA5131A-A)を装備。TD62783を使用してソース電流で駆動。TIM1CH1-3を使用してPWM駆動。 写真 9?8 フルカラーLEDとトランジスタアレイ ***P2170574***
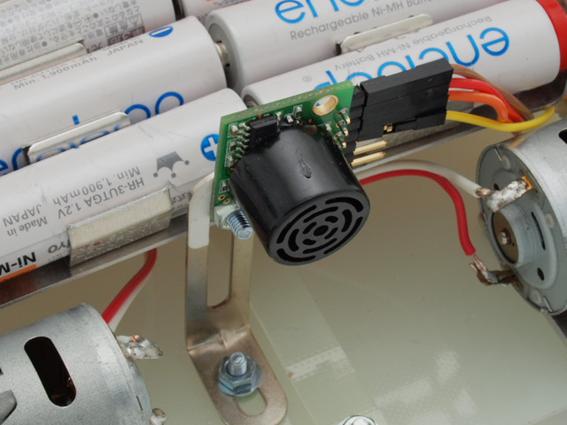
・状態や入力を音で確認できるようにするために圧電スピーカー(SPT08)を装備。TD62783を使用してソース電流で駆動。TIM4CH3を使用してPWM駆動。 ・前方の障害物を広範に検知できるようにするため超音波距離センサ(LV-MaxSonar-EZ1)を装備。RN1002を使用して論理を反転。USART1を使用してデータ受信。同TXピンを使用して動作制御。 写真 9?9 前方測定用超音波センサ ***P2170572***
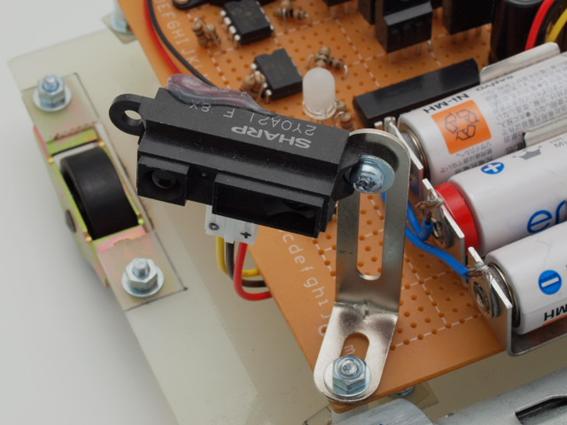
・前方斜め方向の障害物との距離を正確に検知できるようにするために、PSDセンサ(GP2Y0A21YK0F)を2個装備(1時30分方向と10時30分方向)。ADC1CH8とADC2CH9を使用して読み取り。ローパスフィルタを掛ける。 写真 9?10 斜め方向測定用PSDセンサ ***P2170571***
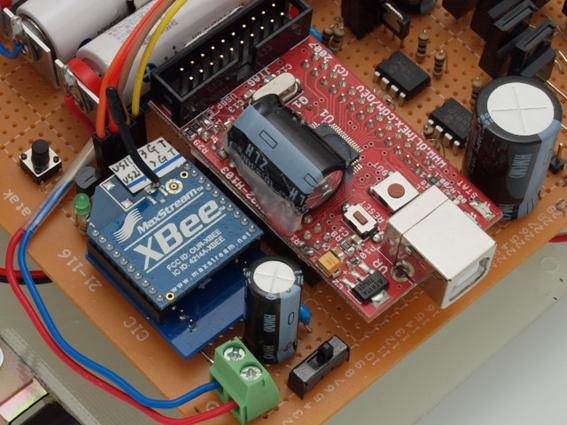
・ユーザーからの押下による入力を受け付けるためタクトスイッチ2個を装備。GPIOY_1とGPIOY_3を使用して読み取り。マイコン内蔵のプルアップ抵抗を使用。 ・外部からのコントロール及びデバッグのためにシリアル通信ポートを2つ設ける。一つはUSART2をTTLレベルのまま引き出す。もう一つはUSART3からXBeeに接続する。USART3は転送エラーが出る場合に備えてフロー制御ピンを確保する。通信に問題が出ないのであれば接続しない。 写真 9?11 XBeeモジュール マイコンボード上に電解コンデンサを載せた ***P2170578***
・パニックボタンとしてオンボードスイッチを使用する。 ・ピン数の少ないマイコンで足りるので、マイコンボードはSTM32-H103を使用する。 写真 9?12 基板裏面にはスパゲッティ状態の配線が見える ***P2170588***
|
Previous: 9.1. マウス |
Up: 9.1. マウス |
Next: 9.1.2. マイコンとのピン接続 |