トップページに戻る(マイコン徹底入門:STM32で始めるARM/Cortex-M3組み込み開発)
「マイコン徹底入門」とは? | 「マイコン徹底入門」を読む | ダウンロード | 掲示板 | 筆者の自己紹介
Previous: 9.2. コントローラ |
Up: 9.2. コントローラ |
Next: 9.2.2. マイコンとのピン接続 |
コントローラのハードウェア部分の仕様は以下の通りです。
|
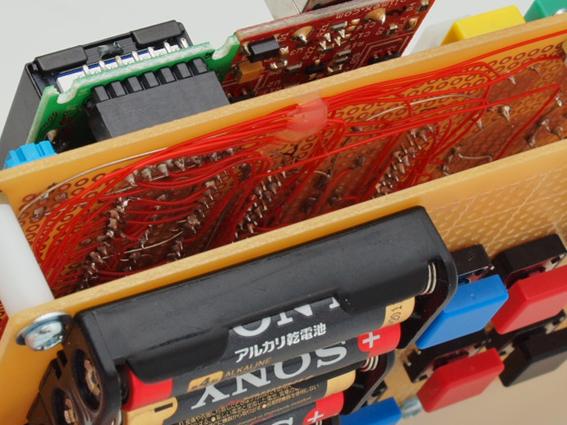
・ユニバーサル基板2枚をサンドイッチした構造にする。 写真 9?16 基板をサンドイッチ構造にすると配線に手をふてずに済むというアイデア ***P2170606***
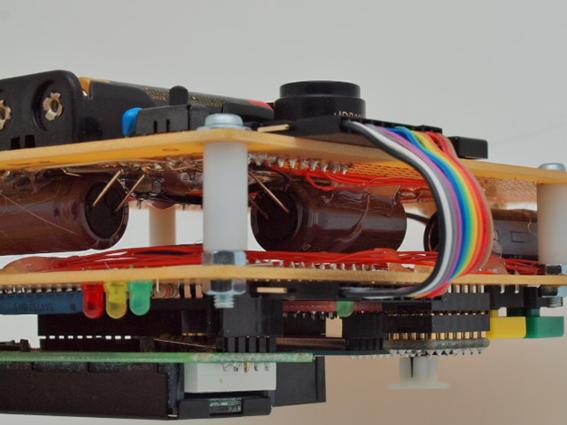
写真 9?17 基板と基板はパラレルケーブルで結線 基板の間に電解コンデンサを挟み込んだ ***P2170608***
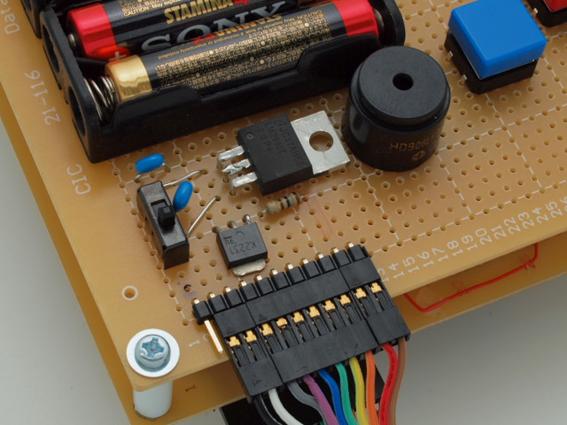
・電源は9Vのアルカリ電池(単三×6)。ただし試作中は9VのACアダプタで電力を供給。 写真 9?18 5V用レギュレタは大きめのものを使用 ***P2170601***
・中心となる入力デバイスとしてアナログジョイスティックを使用。左右1個ずつで合計4軸。STM32の内蔵ADCを2個使用して読み取る。 写真 9?19 共立電子で投げ売りされていたスイッチ付きアナログジョイスティック×2 ボタンには0からFまでの番号を付けた ***P2170611***
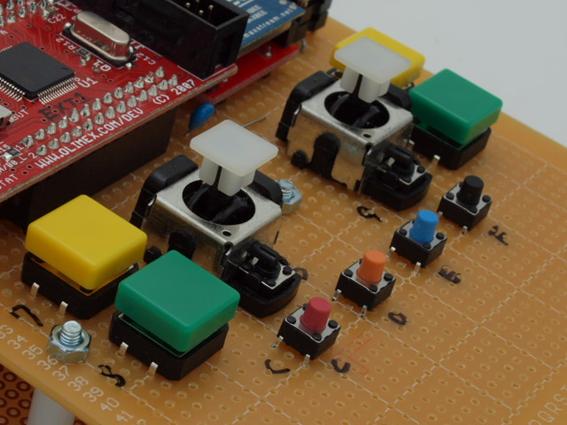
・補助用の入力デバイスとしてタクトスイッチを使用。合計16個をパラレルイン・シリアルアウトシフトレジスタを使用して読み取る。同期型シリアルではなくGPIOで読み取る。 写真 9?20 シフトレジスタやバッファ、ローパスフィルタは実装面積を節約するため液晶モジュール、マイコンボードの裏側に配置 ***P3020961***
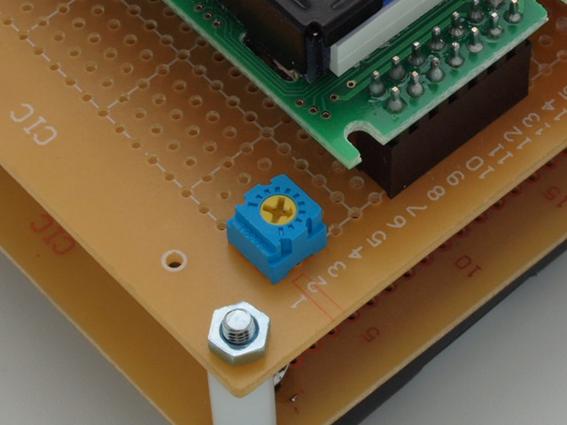
・各種のパラメータの確認や、情報入力時の確認用としてキャラクタ液晶(16字×2行)を使用。GPIOを使用して接続。液晶モジュールからのデータ読み取りは行わない。 写真 9?21 操作する環境の明るさが変化することを想定し輝度調整抵抗をちゃんと実装 ***P2170612***
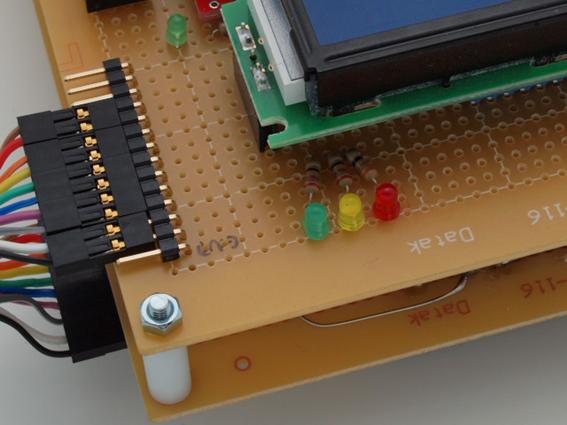
・状態を直感的に判断できるように3色(赤・橙・緑)のLEDを装備。輝度はタイマを使用して調整。パターン点灯できるようにする。 写真 9?22 LEDは見やすいようにスモークがかったものを使用した ***P2170609***
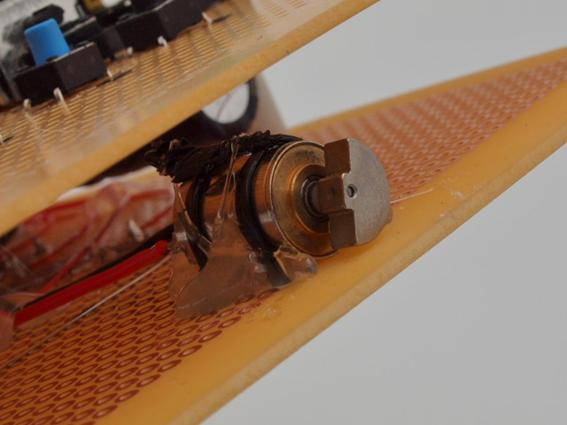
・状態や入力を音で確認できるようにするために自励式ブザーを使用する。 ・状態を体感して確認できるようにするために振動モータを使用する。 写真 9?23 使用した振動モータ ジャンクショップで購入したもの ***P3081362***
写真 9?24 振動モータは基板の間に取り付けた 針金で縛り付けてホットボンドで固定 ***P2170603***
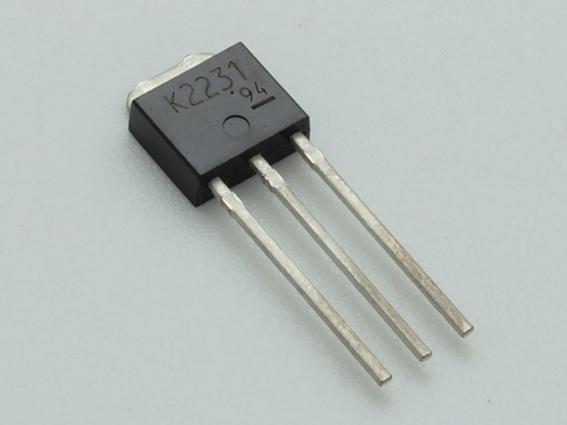
写真 9?25 振動モータのドライブに使用した中電流用パワーMOS-FET 2SK2231 ***P3041074***
・Wiiコントローラのように向きやモーションで入力ができるよう加速度センサを接続する。 写真 9?26 デジタル接続(SPI)の加速度センサを使用 ***P2170610***
・ピン数の少ないマイコンでは不安だが、ぎりぎりSTM32-H103でもIOは足りるのでこれを使用する。 |
Previous: 9.2. コントローラ |
Up: 9.2. コントローラ |
Next: 9.2.2. マイコンとのピン接続 |