

トップページに戻る(マイコン徹底入門:STM32で始めるARM/Cortex-M3組み込み開発)
「マイコン徹底入門」とは? | 「マイコン徹底入門」を読む | ダウンロード | 掲示板 | 筆者の自己紹介
Previous: 9.1.5.2. 他律制御 |
Up: 9. FreeRTOSを利用したマウスロボット |
Next: 9.2.1. ハードウェア仕様概要 |
写真 9?14 全景(表から見た状態)
***P3041259***
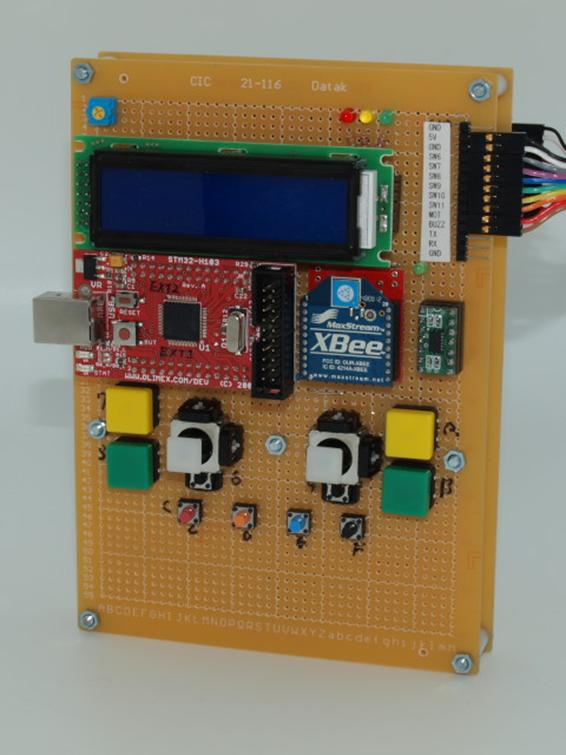
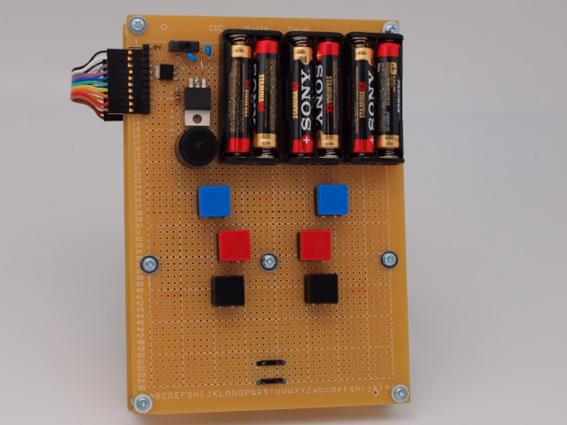
写真 9?15 全景(裏から見た状態)
***P2170599***
Previous: 9.1.5.2. 他律制御 |
Up: 9. FreeRTOSを利用したマウスロボット |
Next: 9.2.1. ハードウェア仕様概要 |